
โครงงานนี้อธิบายถึงวิธีการเคลื่อนย้ายมอเตอร์กระแสตรงไปข้างหน้าหรือย้อนกลับโดยใช้รีโมทคอนโทรลของทีวีหรือดีวีดีเป้าหมายคือการสร้างตัวขับมอเตอร์แบบสองทิศทางอย่างง่ายที่ใช้พัลส์เทรนอินฟราเรดแบบมอดูเลต (IR) 38kHz โดยไม่ต้องใช้ไมโครคอนโทรลเลอร์หรือการตั้งโปรแกรมใดๆ
ต้นแบบของผู้เขียนแสดงในรูปที่ 1

วงจรและการทำงาน
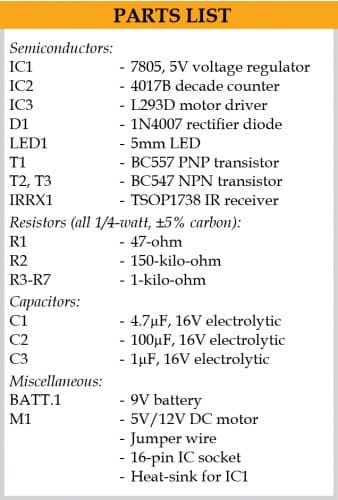
แผนภาพวงจรของโครงการแสดงในรูปที่ 2 มันถูกสร้างขึ้นรอบ ๆ โมดูลรับสัญญาณ IR TSOP1738 (IRRX1), ตัวนับทศวรรษ 4017B (IC2), ตัวขับมอเตอร์ L293D (IC3), ทรานซิสเตอร์ PNP BC557 (T1), ทรานซิสเตอร์ BC547 NPN สองตัว ( T2 และ T3), แหล่งจ่ายไฟที่มีการควบคุม 5V (IC1) และแบตเตอรี่ 9V
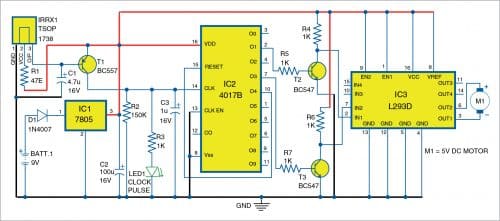
แบตเตอรี่ 9V เชื่อมต่อผ่านไดโอด D1 กับตัวควบคุมแรงดันไฟฟ้า 7805 เพื่อสร้าง 5V DC ที่จำเป็นสำหรับโปรเจ็กต์ตัวเก็บประจุ C2 (100µF, 16V) ใช้สำหรับการปฏิเสธระลอกคลื่น
ภายใต้สภาวะปกติ เอาต์พุตพิน 3 ของโมดูล IR IRRX1 อยู่ที่ลอจิกสูง ซึ่งหมายความว่าทรานซิสเตอร์ T1 ที่เชื่อมต่ออยู่ถูกตัดออก ดังนั้นขั้วสะสมจึงอยู่ที่ลอจิกต่ำตัวสะสมของ T1 ขับเคลื่อนพัลส์นาฬิกาของตัวนับทศวรรษ IC2
เมื่อชี้รีโมทไปทางโมดูล IR และกดปุ่มใดๆ โมดูลจะได้รับพัลส์ IR 38kHz จากรีโมทคอนโทรลพัลส์เหล่านี้จะกลับด้านที่ตัวสะสมของ T1 และมอบให้กับอินพุตนาฬิกาพิน 14 ของตัวนับทศวรรษ IC2
พัลส์ IR ที่มาถึงจะเพิ่มตัวนับทศวรรษในอัตราเดียวกัน (38kHz) แต่เนื่องจากมีตัวกรอง RC (R2=150k และ C3=1µF) ที่พินอินพุตนาฬิกา 14 ของ IC2 รถไฟของพัลส์จึงปรากฏเป็นพัลส์เดี่ยวที่ เคาน์เตอร์ดังนั้นเมื่อกดแต่ละคีย์ ตัวนับจะเดินหน้าด้วยการนับเพียงครั้งเดียวเท่านั้น
เมื่อปล่อยกุญแจรีโมท ตัวเก็บประจุ C3 จะคายประจุผ่านตัวต้านทาน R2 และเส้นสัญญาณนาฬิกาจะกลายเป็นศูนย์ดังนั้นทุกครั้งที่ผู้ใช้กดและปล่อยปุ่มบนรีโมท ตัวนับจะได้รับพัลส์เดียวที่อินพุตนาฬิกา และ LED1 จะสว่างขึ้นเพื่อยืนยันว่าได้รับพัลส์แล้ว
ในระหว่างการดำเนินการอาจมีความเป็นไปได้ 5 ประการ:
กรณีที่ 1
เมื่อกดปุ่มบนรีโมท พัลส์แรกจะมาถึงและเอาต์พุต O0 ของตัวนับทศวรรษ (IC2) จะสูงในขณะที่พิน O1 ถึง O9 อยู่ในระดับต่ำ ซึ่งหมายความว่าทรานซิสเตอร์ T2 และ T3 อยู่ในสถานะตัดการเชื่อมต่อตัวสะสมของทรานซิสเตอร์ทั้งสองตัวถูกดึงไปที่สถานะสูงด้วยตัวต้านทาน 1 กิโลโอห์ม (R4 และ R6) ดังนั้นทั้งขั้วอินพุต IN1 และ IN2 ของตัวขับมอเตอร์ L293D (IC3) จึงมีค่าสูงในขั้นตอนนี้ มอเตอร์อยู่ในสถานะปิด
กรณีที่ 2
เมื่อกดปุ่มอีกครั้ง พัลส์ที่สองที่มาถึงเส้น CLK จะเพิ่มตัวนับทีละหนึ่งนั่นคือเมื่อพัลส์ที่สองมาถึง เอาต์พุต O1 ของ IC2 จะสูง ในขณะที่เอาต์พุตที่เหลือจะต่ำดังนั้นทรานซิสเตอร์ T2 ดำเนินการและ T3 ถูกตัดออกซึ่งหมายความว่าแรงดันไฟฟ้าที่ตัวสะสมของ T2 จะต่ำ (IN1 ของ IC3) และแรงดันไฟฟ้าที่ตัวสะสมของ T3 จะสูง (IN2 ของ IC3) และอินพุต IN1 และ IN2 ของตัวขับมอเตอร์ IC3 จะกลายเป็น 0 และ 1 ตามลำดับในสภาวะนี้ มอเตอร์จะหมุนไปในทิศทางไปข้างหน้า
กรณีที่ 3
เมื่อกดปุ่มอีกครั้ง พัลส์ที่สามที่มาถึงเส้น CLK จะเพิ่มตัวนับอีกครั้งหนึ่งดังนั้น O2 เอาท์พุตของ IC2 จึงสูงเนื่องจากไม่มีอะไรเชื่อมต่อกับพิน O2 และพินเอาท์พุต O1 และ O3 จึงต่ำ ดังนั้นทั้งทรานซิสเตอร์ T2 และ T3 จึงเข้าสู่สถานะตัดการเชื่อมต่อ
ขั้วสะสมของทรานซิสเตอร์ทั้งสองตัวถูกดึงไปที่สถานะสูงโดยตัวต้านทาน 1 กิโลโอห์ม R4 และ R6 ซึ่งหมายความว่าขั้วอินพุต IN1 และ IN2 ของ IC3 จะมีค่าสูงในขั้นตอนนี้ มอเตอร์จะอยู่ในสถานะปิดอีกครั้ง
กรณีที่ 4
เมื่อกดปุ่มอีกครั้ง พัลส์ที่สี่มาถึงเส้น CLK จะเพิ่มตัวนับทีละหนึ่งเป็นครั้งที่สี่ตอนนี้เอาท์พุต O3 ของ IC2 ขึ้นสูง ในขณะที่เอาท์พุตที่เหลือต่ำ ดังนั้นทรานซิสเตอร์ T3 จึงดำเนินการซึ่งหมายความว่าแรงดันไฟฟ้าที่ตัวสะสมของ T2 จะสูง (IN1 ของ IC3) และแรงดันไฟฟ้าที่ตัวสะสมของ T3 จะต่ำ (IN2 ของ IC3)ดังนั้นอินพุต IN1 และ IN2 ของ IC3 จะอยู่ที่ระดับ 1 และ 0 ตามลำดับในสภาวะนี้ มอเตอร์จะหมุนในทิศทางตรงกันข้าม
กรณีที่ 5
เมื่อกดปุ่มครั้งที่ห้า พัลส์ที่ห้าที่มาถึงเส้น CLK จะเพิ่มตัวนับอีกครั้งหนึ่งอีกครั้งเนื่องจาก O4 (พิน 10 ของ IC2) ถูกต่อสายเพื่อรีเซ็ตอินพุตพิน 15 ของ IC2 การกดเป็นครั้งที่ห้าจะทำให้ IC ตัวนับทศวรรษกลับสู่สภาวะการเปิดเครื่องใหม่โดยมีค่า O0 สูง
ดังนั้นวงจรจึงทำงานเหมือนกับตัวขับมอเตอร์แบบสองทิศทางซึ่งควบคุมด้วยรีโมทคอนโทรลอินฟราเรด
การก่อสร้างและการทดสอบ
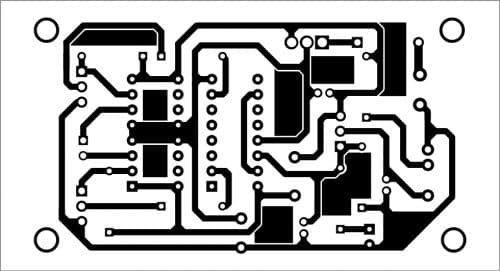
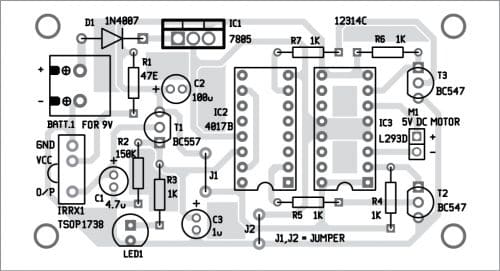
สามารถประกอบวงจรบน Veroboard หรือ PCB ได้ซึ่งมีโครงร่างขนาดจริงแสดงในรูปที่ 3 โครงร่างส่วนประกอบสำหรับ PCB แสดงในรูปที่ 4
ดาวน์โหลด PDF เค้าโครง PCB และส่วนประกอบ:คลิกที่นี่
หลังจากประกอบวงจรแล้ว ให้ต่อแบตเตอรี่ 9V เข้ากับ BATT.1อ้างอิงตารางความจริง (ตารางที่ 1) สำหรับการดำเนินการ และปฏิบัติตามขั้นตอนที่อธิบายไว้ในกรณีที่ 1 ถึงกรณีที่ 5 ข้างต้น
เรียบเรียงโดยลิซ่า
เวลาโพสต์: Sep-29-2021