

จอแสดงผลดิจิตอลแรงดันสูง 220V Nema42 สเต็ปเปอร์มอเตอร์วงปิด 12Nm
NEMA42 Easy Servo Series (ซีรีส์ NEMA42 Closed Loop)
พารามิเตอร์ทางไฟฟ้าของมอเตอร์:
| โหมด | มุมก้าว | ปัจจุบัน (ก) | ความต้านทาน (Ω±10%) | ตัวเหนี่ยวนำ (มิลลิเอช±20%) | แรงบิดในการถือครอง (Nm) | ความยาวมอเตอร์(มิลลิเมตร) | ตัวเข้ารหัส ความละเอียด(PPR) | ไดร์เวอร์ที่ใช้งานได้ |
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1,000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1,000 | 3HSS2260 |
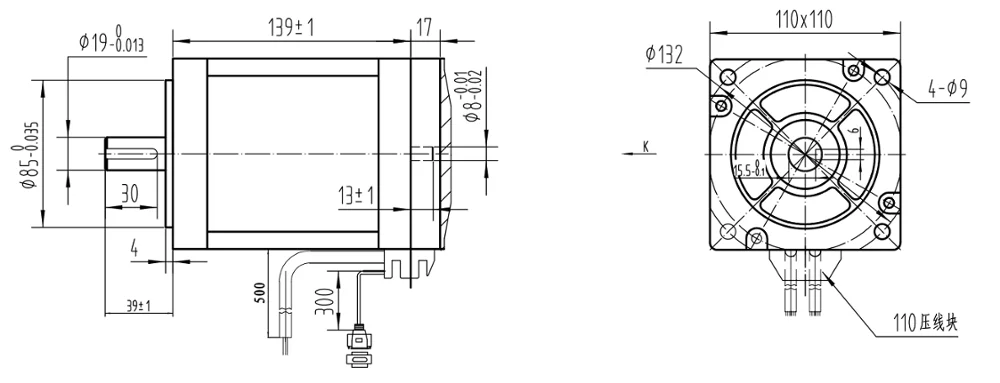
ขนาดมอเตอร์:มม
เส้นโค้งแรงบิด/ความถี่
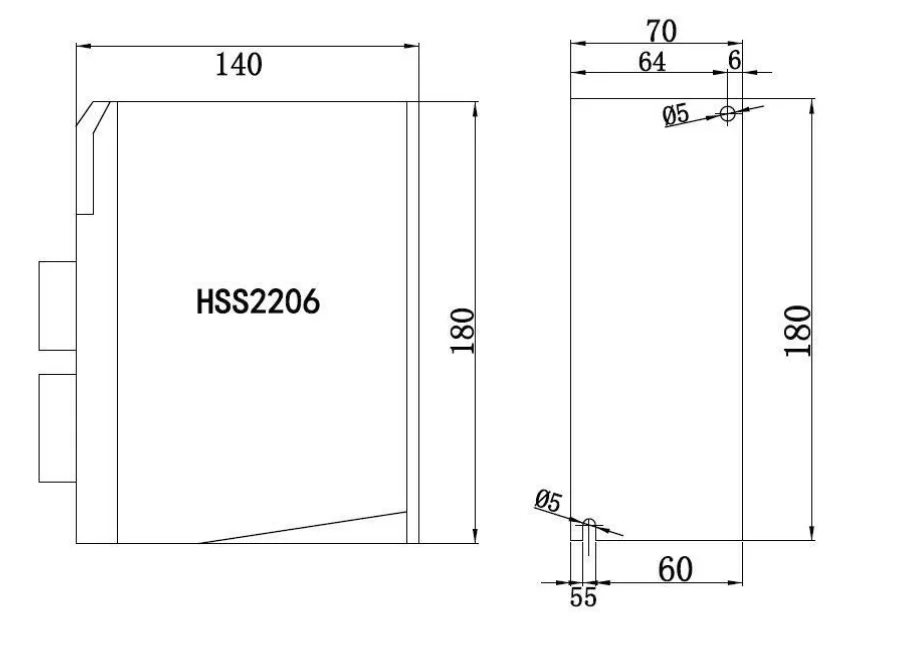
ไดร์เวอร์ 3HSS2260
คุณสมบัติ
1, 32 บิต DSP และเวกเตอร์เทคโนโลยีการควบคุมวงปิด
2 โดยไม่สูญเสียขั้นตอน มีความแม่นยำสูงในตำแหน่ง
3 ปรับปรุงแรงบิดเอาท์พุตของมอเตอร์และความเร็วในการทำงาน
4, เทคโนโลยีการควบคุมกระแสตัวแปร, ยับยั้งการเพิ่มขึ้นของอุณหภูมิมอเตอร์
5 ปรับให้เข้ากับสภาวะการรับน้ำหนักทางกลต่างๆ (รวมถึงรอกที่มีความแข็งต่ำ)
จำเป็นต้องปรับพารามิเตอร์เกน
6, การเคลื่อนย้ายที่ราบรื่นและเชื่อถือได้, การสั่นสะเทือนต่ำ, การปรับปรุงที่ยอดเยี่ยมในการเร่งความเร็วและ
ชะลอตัวลง
7 ความสามารถของความเร็วเป็นศูนย์คงที่โดยไม่มีการสั่นสะเทือน
8, ปรับให้เข้ากับเซอร์โวมอเตอร์ไฮบริด 3 เฟส 86 (NEMA34) และ 110 (NEMA 42)
9, ความถี่พัลส์ขั้นตอนสูงสุด 200KHZ
10, ไมโครสเต็ป 400-60000 พัลส์/รอบ
11, ช่วงแรงดันไฟฟ้า AC150-240V
12, กระแสเกิน, แรงดันเกินและการป้องกันตำแหน่งเกิน
13, หกหลอดดิจิตอลจอแสดงผล, ง่ายต่อการตั้งค่าพารามิเตอร์และตรวจสอบมอเตอร์ทำงาน
สถานะ
การเลือกไมโครสเต็ป:
| รหัส | คำนิยาม | พิสัย | ค่าเริ่มต้น | ข้อสังเกต |
| PA0 | หมายเลขเวอร์ชัน | 501 | ห้ามมิให้มีการปรับเปลี่ยน | |
| PA1 | การเลือกโหมดการควบคุม | 0~2 | 0 | |
| PA2 | การเลือกประเภทมอเตอร์ | 0~2 | 0 | |
| PA3 | เปิดจอแสดงผล | 0~7 | 0 | |
| PA4 | วงปัจจุบัน Kp | 0~1,000 | 200 | ห้ามมิให้มีการปรับเปลี่ยน |
| PA5 | วงปัจจุบันกี่ | 0~1,000 | 300 | ห้ามมิให้มีการปรับเปลี่ยน |
| PA6 | ตำแหน่งห่วง Kp | 0~1,000 | 300 | |
| PA7 | การตั้งค่าขั้นตอนไมโคร | 400~60000 | 4000 | |
| PA8 | ความละเอียดของตัวเข้ารหัส (1,000) | 4000 | ห้ามมิให้มีการปรับเปลี่ยน | |
| PA9 | ความละเอียดของตัวเข้ารหัส (1,000) | 40~30000 | 1,000 | |
| PA10 | โฮลดิ้งปัจจุบัน | 10~100 | 40 | |
| PA11 | กระแสวงปิด | 10~100 | 100 | |
| PA12 | การจอง | |||
| PA13 | การจอง | |||
| PA14 | เปิดใช้งานระดับ | 0/1 | 0 | |
| PA15 | ระดับสัญญาณเตือน | 0/1 | 0 | |
| PA16 | การเลือกโหมดพัลส์ | 0/1 | 0 | |
| PA17 | ขอบชีพจร | 0/1 | 0 | |
| PA18 | ทิศทางการหมุนของมอเตอร์ | 0/1 | 0 | |
| PA19 | ความเร็วเขย่าเบา ๆ | 1~200 | 60 | |
| PA20 | ส่วนโหมดค้างอยู่ | 0/1 | 0 | |
| PA21 | ระดับค้างอยู่ | 0/1 | 0 |
ขนาดไดร์เวอร์ (มม.):
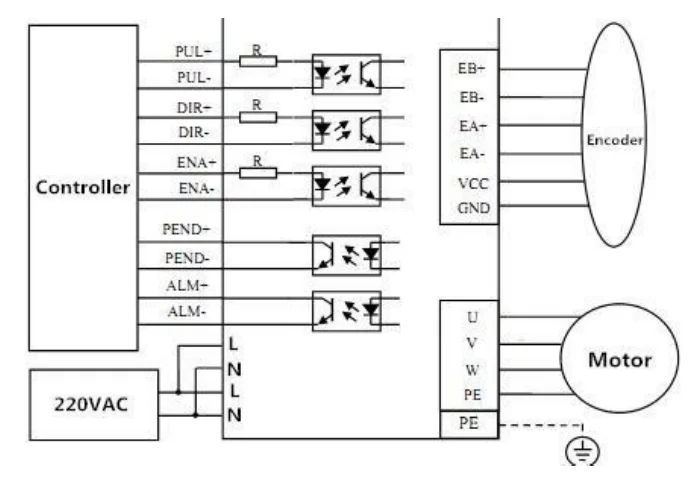
แผนภาพการเดินสายไฟ:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
